专栏 | 手机端运行卷积神经网络实践:基于TensorFlow和OpenCV实现文档检测功能
机器之心投稿
作者:腾讯 iOS 客户端高级工程师冯牮
本文作者通过一个真实的产品案例,展示了在手机客户端上运行一个神经网络的关键技术点。
文章目录:
1. 前言
2. 需求是什么
3. 传统的技术方案
4. 传统技术方案的难度和局限性
5. 思考如何改善
6. 无效的神经网络算法
7. 有效的神经网络算法
8. 训练网络
9. 训练数据集 (大量合成数据 + 少量真实数据)
10. 在手机设备上运行 TensorFlow
11. HED 网络在手机上遇到的奇怪 crash
12. 裁剪 TensorFlow
13. 裁剪 HED 网络
14. TensorFlow API 的选择
15. OpenCV 算法
16. 总结
17. 参考文献
前言
-
本文不是神经网络或机器学习的入门教学,而是通过一个真实的产品案例,展示了在手机客户端上运行一个神经网络的关键技术点。
-
在卷积神经网络适用的领域里,已经出现了一些很经典的图像分类网络,比如 VGG16/VGG19,Inception v1-v4 Net,ResNet 等,这些分类网络通常又都可以作为其他算法中的基础网络结构,尤其是 VGG 网络,被很多其他的算法借鉴,本文也会使用 VGG16 的基础网络结构,但是不会对 VGG 网络做详细的入门教学
-
虽然本文不是神经网络技术的入门教程,但是仍然会给出一系列的相关入门教程和技术文档的链接,有助于进一步理解本文的内容
-
具体使用到的神经网络算法,只是本文的一个组成部分,除此之外,本文还介绍了如何裁剪 TensorFlow 静态库以便于在手机端运行,如何准备训练样本图片,以及训练神经网络时的各种技巧等等
需求是什么

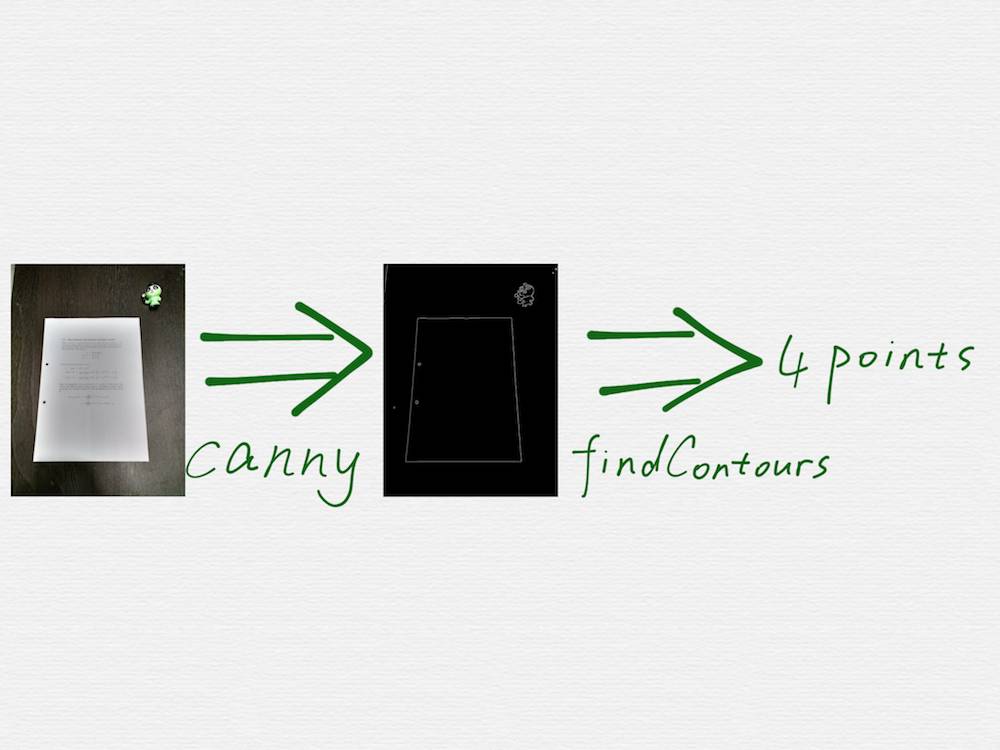
需求很容易描述清楚,如上图,就是在一张图里,把矩形形状的文档的四个顶点的坐标找出来。
传统的技术方案
Google 搜索 opencv scan document,是可以找到好几篇相关的教程的,这些教程里面的技术手段,也都大同小异,关键步骤就是调用 OpenCV 里面的两个函数,cv2.Canny() 和 cv2.findContours()。
看上去很容易就能实现出来,但是真实情况是,这些教程,仅仅是个 demo 演示而已,用来演示的图片,都是最理想的简单情况,真实的场景图片会比这个复杂的多,会有各种干扰因素,调用 canny 函数得到的边缘检测结果,也会比 demo 中的情况凌乱的多,比如会检测出很多各种长短的线段,或者是文档的边缘线被截断成了好几条短的线段,线段之间还存在距离不等的空隙。另外,findContours 函数也只能检测闭合的多边形的顶点,但是并不能确保这个多边形就是一个合理的矩形。因此在我们的第一版技术方案中,对这两个关键步骤,进行了大量的改进和调优,概括起来就是:
-
改进 canny 算法的效果,增加额外的步骤,得到效果更好的边缘检测图
-
针对 canny 步骤得到的边缘图,建立一套数学算法,从边缘图中寻找出一个合理的矩形区域
传统技术方案的难度和局限性
-
canny 算法的检测效果,依赖于几个阀值参数,这些阀值参数的选择,通常都是人为设置的经验值,在改进的过程中,引入额外的步骤后,通常又会引入一些新的阀值参数,同样,也是依赖于调试结果设置的经验值。整体来看,这些阀值参数的个数,不能特别的多,因为一旦太多了,就很难依赖经验值进行设置,另外,虽然有这些阀值参数,但是最终的参数只是一组或少数几组固定的组合,所以算法的鲁棒性又会打折扣,很容易遇到边缘检测效果不理想的场景
-
在边缘图上建立的数学模型很复杂,代码实现难度大,而且也会遇到算法无能为力的场景
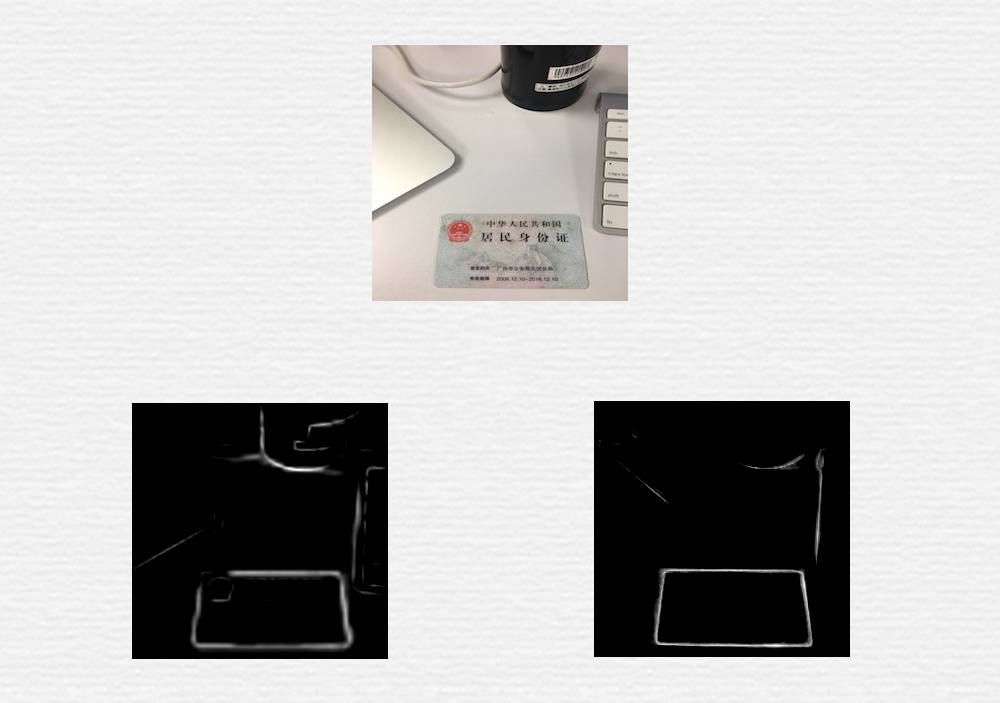
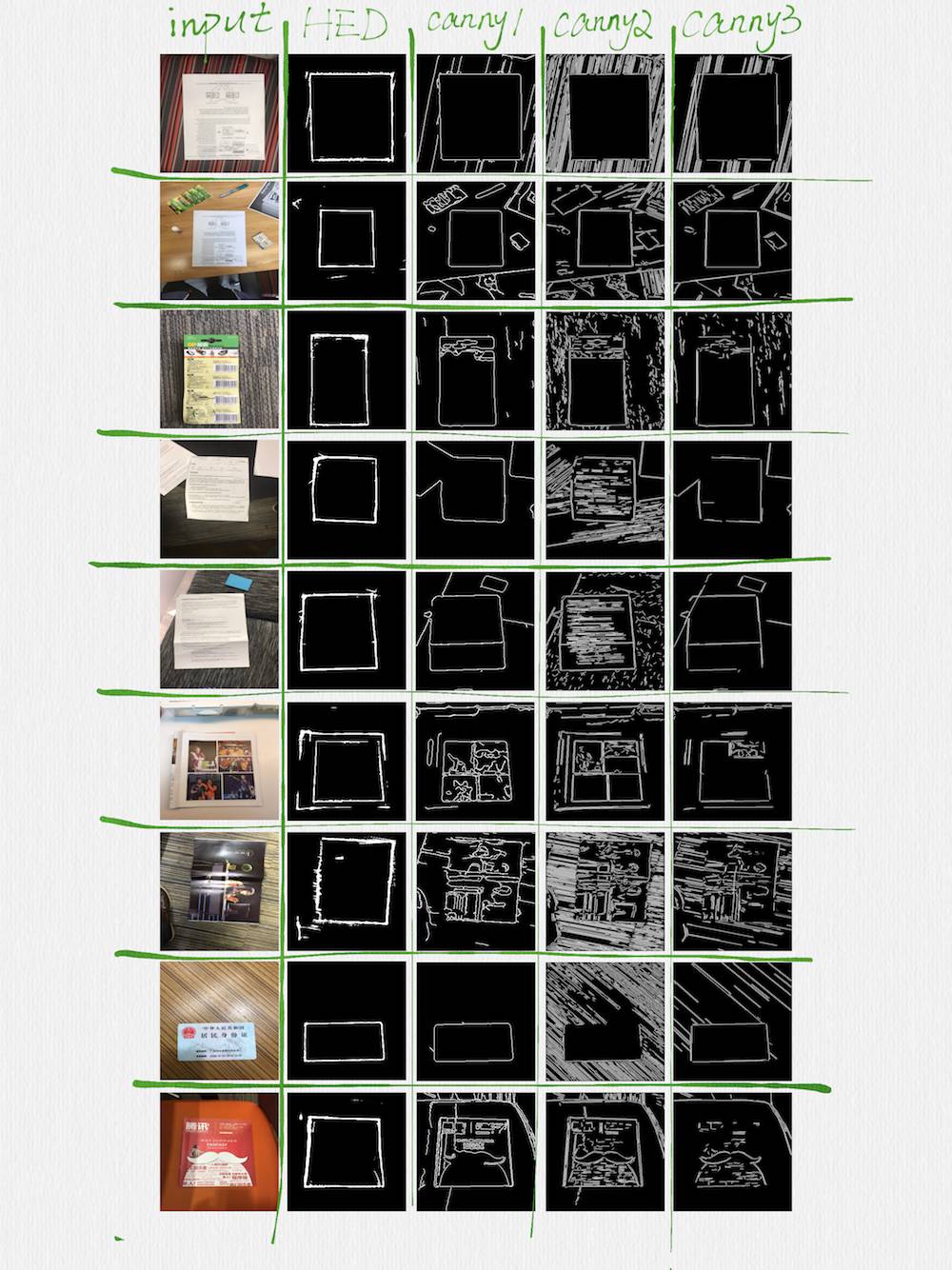
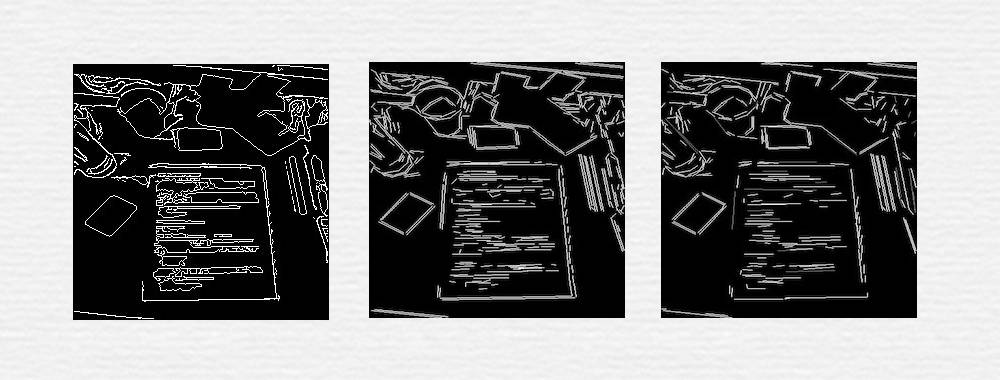
下面这张图表,能够很好的说明上面列出的这两个问题:
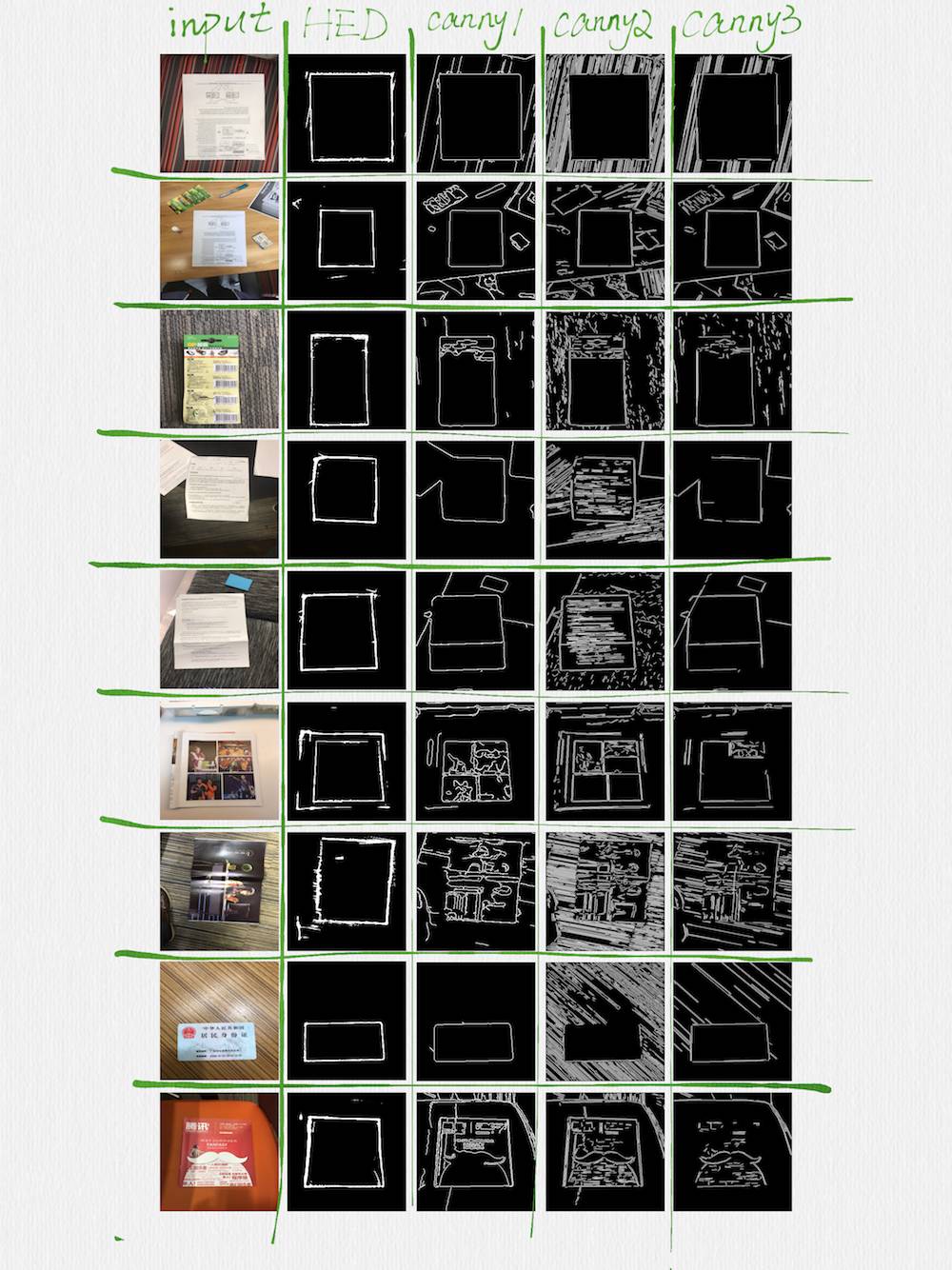
这张图表的第一列是输入的 image,最后的三列 (先不用看这张图表的第二列),是用三组不同阀值参数调用 canny 函数和额外的函数后得到的输出 image,可以看到,边缘检测的效果,并不总是很理想的,有些场景中,矩形的边,出现了很严重的断裂,有些边,甚至被完全擦除掉了,而另一些场景中,又会检测出很多干扰性质的长短边。可想而知,想用一个数学模型,适应这么不规则的边缘图,会是多么困难的一件事情。
思考如何改善
在第一版的技术方案中,负责的同学花费了大量的精力进行各种调优,终于取得了还不错的效果,但是,就像前面描述的那样,还是会遇到检测不出来的场景。在第一版技术方案中,遇到这种情况的时候,采用的做法是针对这些不能检测的场景,人工进行分析和调试,调整已有的一组阀值参数和算法,可能还需要加入一些其他的算法流程 (可能还会引入新的一些阀值参数),然后再整合到原有的代码逻辑中。经过若干轮这样的调整后,我们发现,已经进入一个瓶颈,按照这种手段,很难进一步提高检测效果了。
既然传统的算法手段已经到极限了,那不如试试机器学习 / 神经网络。
无效的神经网络算法
end-to-end 直接拟合
首先想到的,就是仿照人脸对齐 (face alignment) 的思路,构建一个端到端 (end-to-end) 的网络,直接回归拟合,也就是让这个神经网络直接输出 4 个顶点的坐标,但是,经过尝试后发现,根本拟合不出来。后来仔细琢磨了一下,觉得不能直接拟合也是对的,因为:
-
除了分类 (classification) 问题之外,所有的需求看上去都像是一个回归 (regression) 问题,如果回归是万能的,学术界为啥还要去搞其他各种各样的网络模型
-
face alignment 之所以可以用回归网络得到很好的拟合效果,是因为在输入 image 上先做了 bounding box 检测,缩小了人脸图像范围后,才做的 regression
-
人脸上的关键特征点,具有特别明显的统计学特征,所以 regression 可以发挥作用
-
在需要更高检测精度的场景中,其实也是用到了更复杂的网络模型来解决 face alignment 问题的
YOLO && FCN
后来还尝试过用 YOLO 网络做 Object Detection,用 FCN 网络做像素级的 Semantic Segmentation,但是结果都很不理想,比如:
-
达不到文档检测功能想要的精确度
-
网络结构复杂,运算量大,在手机上无法做到实时检测
有效的神经网络算法
前面尝试的几种神经网络算法,都不能得到想要的效果,后来换了一种思路,既然传统的技术手段里包含了两个关键的步骤,那能不能用神经网络来分别改善这两个步骤呢,经过分析发现,可以尝试用神经网络来替换 canny 算法,也就是用神经网络来对图像中的矩形区域进行边缘检测,只要这个边缘检测能够去除更多的干扰因素,那第二个步骤里面的算法也就可以变得更简单了。
神经网络的输入和输出
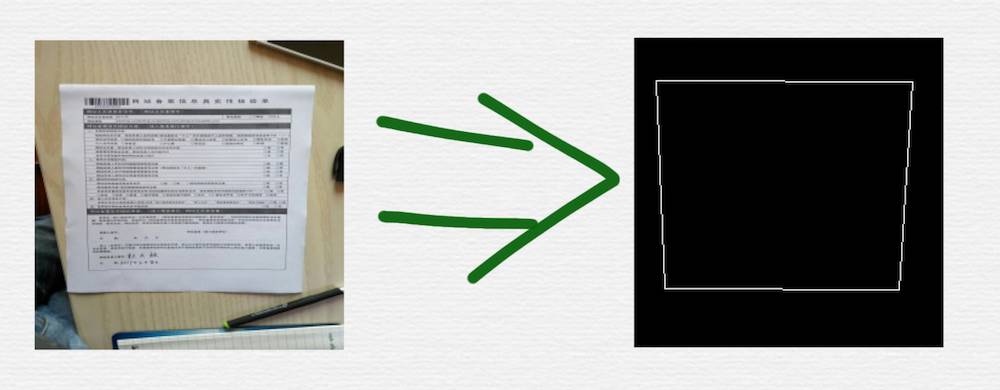
按照这种思路,对于神经网络部分,现在的需求变成了上图所示的样子。
HED(Holistically-Nested Edge Detection) 网络
边缘检测这种需求,在图像处理领域里面,通常叫做 Edge Detection 或 Contour Detection,按照这个思路,找到了 Holistically-Nested Edge Detection 网络模型。
HED 网络模型是在 VGG16 网络结构的基础上设计出来的,所以有必要先看看 VGG16。
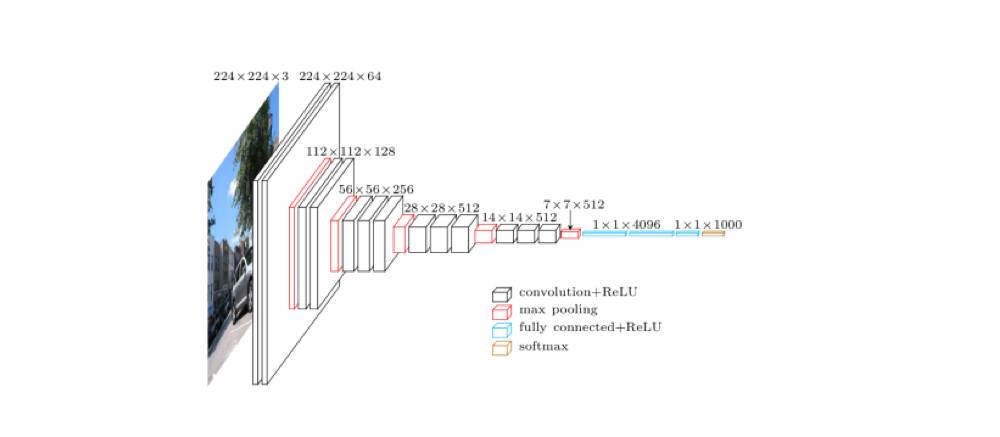
上图是 VGG16 的原理图,为了方便从 VGG16 过渡到 HED,我们先把 VGG16 变成下面这种示意图:
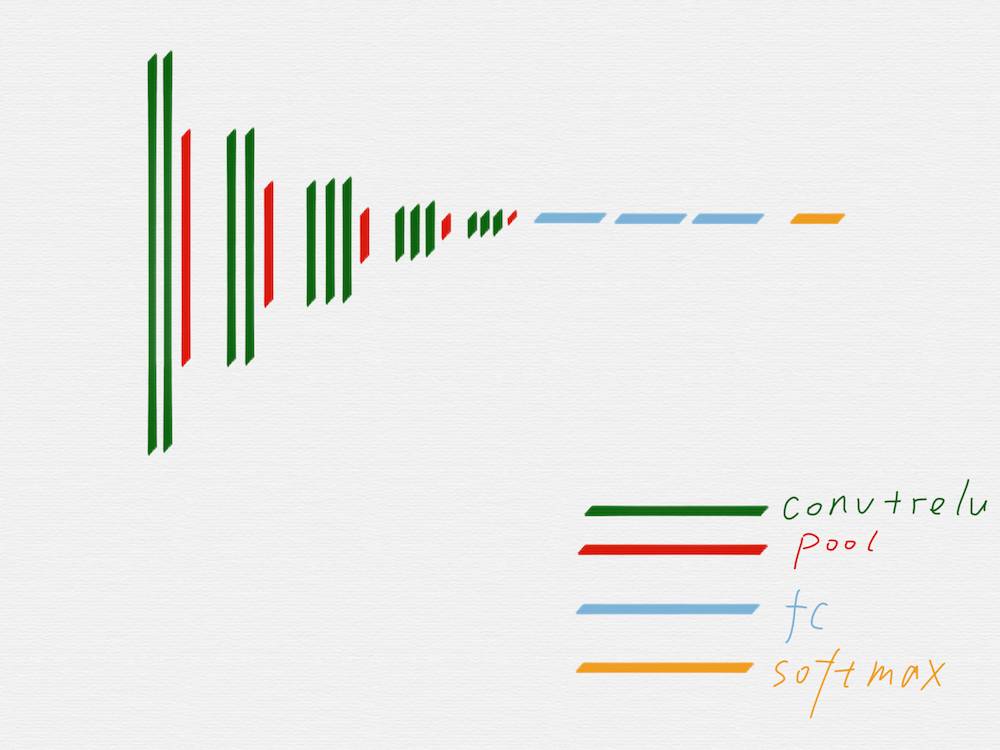
在上面这个示意图里,用不同的颜色区分了 VGG16 的不同组成部分。

从示意图上可以看到,绿色代表的卷积层和红色代表的池化层,可以很明显的划分出五组,上图用紫色线条框出来的就是其中的第三组。
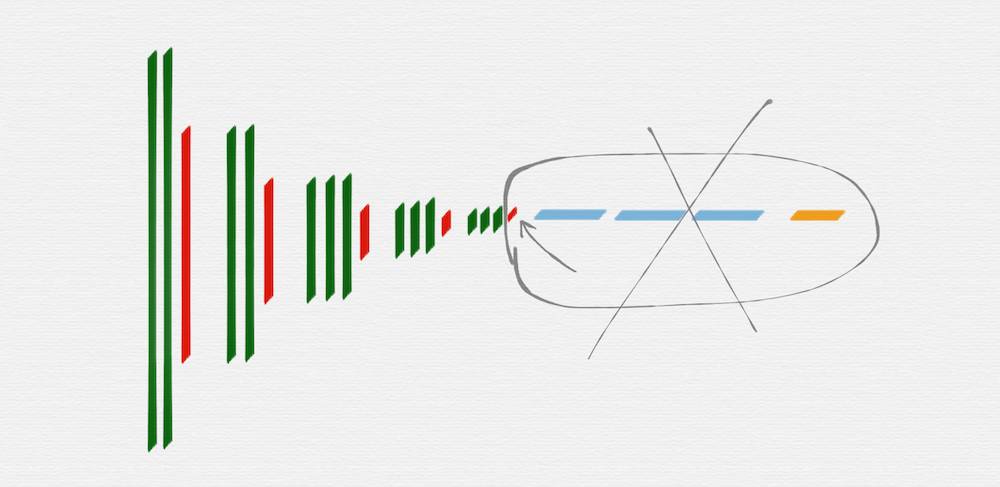
HED 网络要使用的就是 VGG16 网络里面的这五组,后面部分的 fully connected 层和 softmax 层,都是不需要的,另外,第五组的池化层 (红色) 也是不需要的。

去掉不需要的部分后,就得到上图这样的网络结构,因为有池化层的作用,从第二组开始,每一组的输入 image 的长宽值,都是前一组的输入 image 的长宽值的一半。
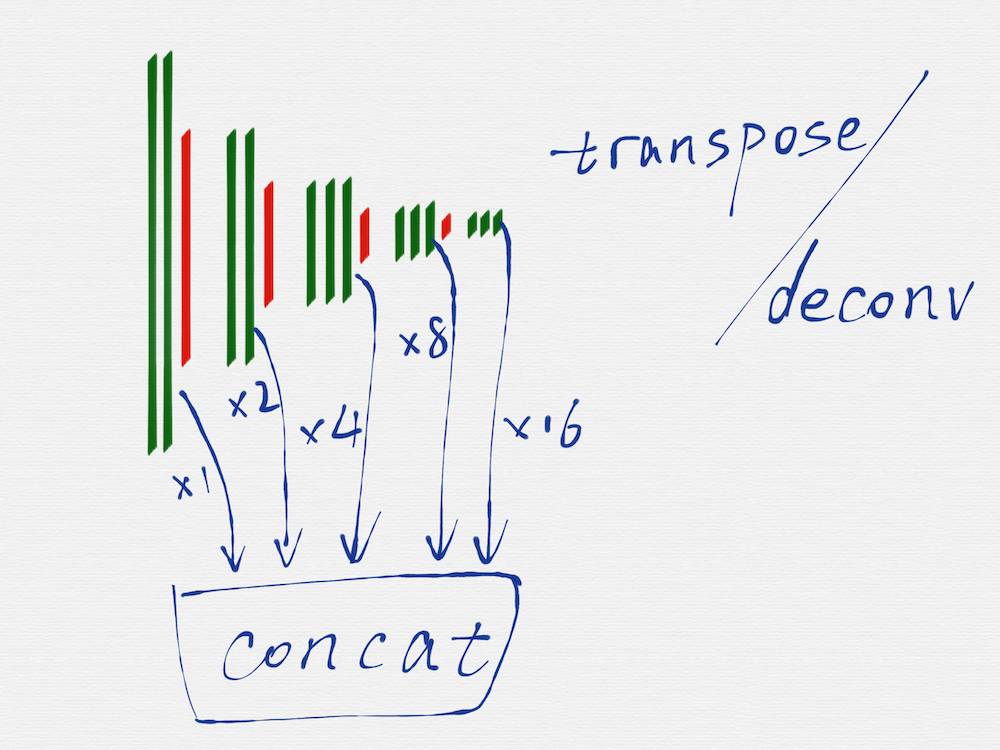
HED 网络是一种多尺度多融合 (multi-scale and multi-level feature learning) 的网络结构,所谓的多尺度,就是如上图所示,把 VGG16 的每一组的最后一个卷积层 (绿色部分) 的输出取出来,因为每一组得到的 image 的长宽尺寸是不一样的,所以这里还需要用转置卷积 (transposed convolution)/ 反卷积 (deconv) 对每一组得到的 image 再做一遍运算,从效果上看,相当于把第二至五组得到的 image 的长宽尺寸分别扩大 2 至 16 倍,这样在每个尺度 (VGG16 的每一组就是一个尺度) 上得到的 image,都是相同的大小了。
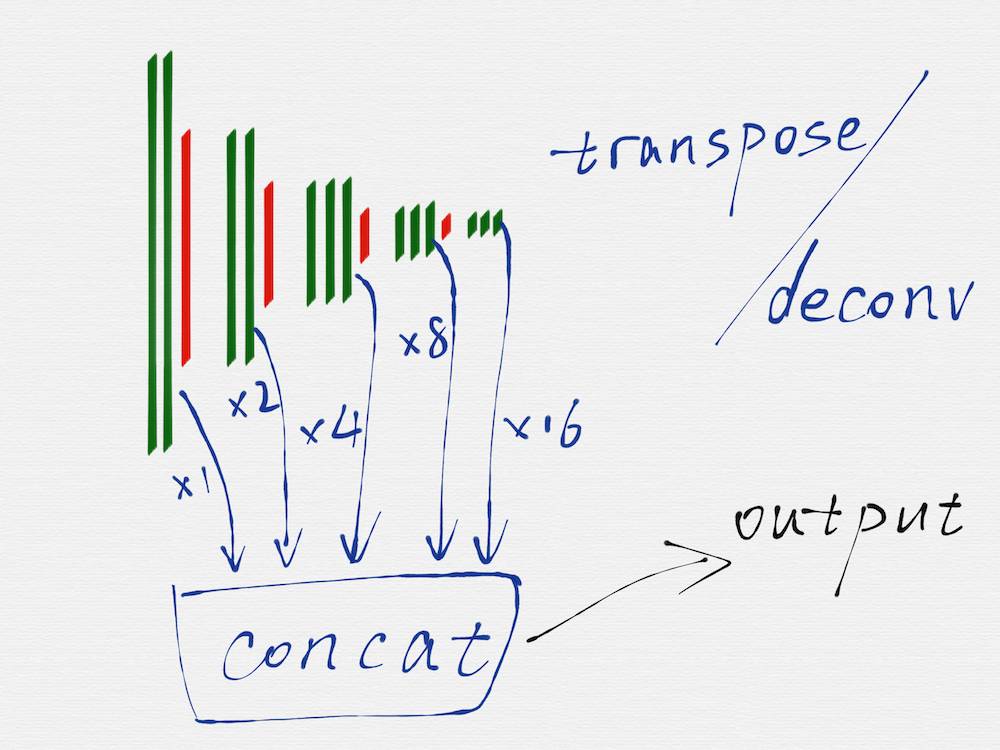
把每一个尺度上得到的相同大小的 image,再融合到一起,这样就得到了最终的输出 image,也就是具有边缘检测效果的 image。
基于 TensorFlow 编写的 HED 网络结构代码如下:
def hed_net(inputs, batch_size):
# ref https://github.com/s9xie/hed/blob/master/examples/hed/train_val.prototxt
with tf.variable_scope('hed', 'hed', [inputs]):
with slim.arg_scope([slim.conv2d, slim.fully_connected],
activation_fn=tf.nn.relu,
weights_initializer=tf.truncated_normal_initializer(0.0, 0.01),
weights_regularizer=slim.l2_regularizer(0.0005)):
# vgg16 conv && max_pool layers
net = slim.repeat(inputs, 2, slim.conv2d, 12, [3, 3], scope='conv1')
dsn1 = net
net = slim.max_pool2d(net, [2, 2], scope='pool1')
net = slim.repeat(net, 2, slim.conv2d, 24, [3, 3], scope='conv2')
dsn2 = net
net = slim.max_pool2d(net, [2, 2], scope='pool2')
net = slim.repeat(net, 3, slim.conv2d, 48, [3, 3], scope='conv3')
dsn3 = net
net = slim.max_pool2d(net, [2, 2], scope='pool3')
net = slim.repeat(net, 3, slim.conv2d, 96, [3, 3], scope='conv4')
dsn4 = net
net = slim.max_pool2d(net, [2, 2], scope='pool4')
net = slim.repeat(net, 3, slim.conv2d, 192, [3, 3], scope='conv5')
dsn5 = net
# net = slim.max_pool2d(net, [2, 2], scope='pool5') # no need this pool layer
# dsn layers
dsn1 = slim.conv2d(dsn1, 1, [1, 1], scope='dsn1')
# no need deconv for dsn1
dsn2 = slim.conv2d(dsn2, 1, [1, 1], scope='dsn2')
deconv_shape = tf.pack([batch_size, const.image_height, const.image_width, 1])
dsn2 = deconv_mobile_version(dsn2, 2, deconv_shape) # deconv_mobile_version can work on mobile
dsn3 = slim.conv2d(dsn3, 1, [1, 1], scope='dsn3')
deconv_shape = tf.pack([batch_size, const.image_height, const.image_width, 1])
dsn3 = deconv_mobile_version(dsn3, 4, deconv_shape)
dsn4 = slim.conv2d(dsn4, 1, [1, 1], scope='dsn4')
deconv_shape = tf.pack([batch_size, const.image_height, const.image_width, 1])
dsn4 = deconv_mobile_version(dsn4, 8, deconv_shape)
dsn5 = slim.conv2d(dsn5, 1, [1, 1], scope='dsn5')
deconv_shape = tf.pack([batch_size, const.image_height, const.image_width, 1])
dsn5 = deconv_mobile_version(dsn5, 16, deconv_shape)
# dsn fuse
dsn_fuse = tf.concat(3, [dsn1, dsn2, dsn3, dsn4, dsn5])
dsn_fuse = tf.reshape(dsn_fuse, [batch_size, const.image_height, const.image_width, 5]) #without this, will get error: ValueError: Number of in_channels must be known.
dsn_fuse = slim.conv2d(dsn_fuse, 1, [1, 1], scope='dsn_fuse')
return dsn_fuse, dsn1, dsn2, dsn3, dsn4, dsn5
训练网络
cost 函数
论文给出的 HED 网络是一个通用的边缘检测网络,按照论文的描述,每一个尺度上得到的 image,都需要参与 cost 的计算,这部分的代码如下:
input_queue_for_train = tf.train.string_input_producer([FLAGS.csv_path])
image_tensor, annotation_tensor = input_image_pipeline(dataset_root_dir_string, input_queue_for_train, FLAGS.batch_size)
dsn_fuse, dsn1, dsn2, dsn3, dsn4, dsn5 = hed_net(image_tensor, FLAGS.batch_size)
cost = class_balanced_sigmoid_cross_entropy(dsn_fuse, annotation_tensor) +
class_balanced_sigmoid_cross_entropy(dsn1, annotation_tensor) +
class_balanced_sigmoid_cross_entropy(dsn2, annotation_tensor) +
class_balanced_sigmoid_cross_entropy(dsn3, annotation_tensor) +
class_balanced_sigmoid_cross_entropy(dsn4, annotation_tensor) +
class_balanced_sigmoid_cross_entropy(dsn5, annotation_tensor)
按照这种方式训练出来的网络,检测到的边缘线是有一点粗的,为了得到更细的边缘线,通过多次试验找到了一种优化方案,代码如下:
input_queue_for_train = tf.train.string_input_producer([FLAGS.csv_path])
image_tensor, annotation_tensor = input_image_pipeline(dataset_root_dir_string, input_queue_for_train, FLAGS.batch_size)
dsn_fuse, _, _, _, _, _ = hed_net(image_tensor, FLAGS.batch_size)
cost = class_balanced_sigmoid_cross_entropy(dsn_fuse, annotation_tensor)
也就是不再让每个尺度上得到的 image 都参与 cost 的计算,只使用融合后得到的最终 image 来进行计算。
两种 cost 函数的效果对比如下图所示,右侧是优化过后的效果:
另外还有一点,按照 HED 论文里的要求,计算 cost 的时候,不能使用常见的方差 cost,而应该使用 cost-sensitive loss function,代码如下:
def class_balanced_sigmoid_cross_entropy(logits, label, name='cross_entropy_loss'):
"""
The class-balanced cross entropy loss,
as in `Holistically-Nested Edge Detection
<http://arxiv.org/abs/1504.06375>`_.
This is more numerically stable than class_balanced_cross_entropy
:param logits: size: the logits.
:param label: size: the ground truth in {0,1}, of the same shape as logits.
:returns: a scalar. class-balanced cross entropy loss
"""
y = tf.cast(label, tf.float32)
count_neg = tf.reduce_sum(1. - y) # the number of 0 in y
count_pos = tf.reduce_sum(y) # the number of 1 in y (less than count_neg)
beta = count_neg / (count_neg + count_pos)
pos_weight = beta / (1 - beta)
cost = tf.nn.weighted_cross_entropy_with_logits(logits, y, pos_weight)
cost = tf.reduce_mean(cost * (1 - beta), name=name)
return cost
转置卷积层的双线性初始化
在尝试 FCN 网络的时候,就被这个问题卡住过很长一段时间,按照 FCN 的要求,在使用转置卷积 (transposed convolution)/ 反卷积 (deconv) 的时候,要把卷积核的值初始化成双线性放大矩阵 (bilinear upsampling kernel),而不是常用的正态分布随机初始化,同时还要使用很小的学习率,这样才更容易让模型收敛。
HED 的论文中,并没有明确的要求也要采用这种方式初始化转置卷积层,但是,在训练过程中发现,采用这种方式进行初始化,模型才更容易收敛。
这部分的代码如下:
def get_kernel_size(factor):
"""
Find the kernel size given the desired factor of upsampling.
"""
return 2 * factor - factor % 2
def upsample_filt(size):
"""
Make a 2D bilinear kernel suitable for upsampling of the given (h, w) size.
"""
factor = (size + 1) // 2
if size % 2 == 1:
center = factor - 1
else:
center = factor - 0.5
og = np.ogrid[:size, :size]
return (1 - abs(og[0] - center) / factor) * (1 - abs(og[1] - center) / factor)
def bilinear_upsample_weights(factor, number_of_classes):
"""
Create weights matrix for transposed convolution with bilinear filter
initialization.
"""
filter_size = get_kernel_size(factor)
weights = np.zeros((filter_size,
filter_size,
number_of_classes,
number_of_classes), dtype=np.float32)
upsample_kernel = upsample_filt(filter_size)
for i in xrange(number_of_classes):
weights[:, :, i, i] = upsample_kernel
return weights
训练过程冷启动
HED 网络不像 VGG 网络那样很容易就进入收敛状态,也不太容易进入期望的理想状态,主要是两方面的原因:
-
前面提到的转置卷积层的双线性初始化,就是一个重要因素,因为在 4 个尺度上,都需要反卷积,如果反卷积层不能收敛,那整个 HED 都不会进入期望的理想状态
-
另外一个原因,是由 HED 的多尺度引起的,既然是多尺度了,那每个尺度上得到的 image 都应该对模型的最终输出 image 产生贡献,在训练的过程中发现,如果输入 image 的尺寸是 224*224,还是很容易就训练成功的,但是当把输入 image 的尺寸调整为 256*256 后,很容易出现一种状况,就是 5 个尺度上得到的 image,会有 1 ~ 2 个 image 是无效的 (全部是黑色)
为了解决这里遇到的问题,采用的办法就是先使用少量样本图片 (比如 2000 张) 训练网络,在很短的训练时间 (比如迭代 1000 次) 内,如果 HED 网络不能表现出收敛的趋势,或者不能达到 5 个尺度的 image 全部有效的状态,那就直接放弃这轮的训练结果,重新开启下一轮训练,直到满意为止,然后才使用完整的训练样本集合继续训练网络。
训练数据集 (大量合成数据 + 少量真实数据)
HED 论文里使用的训练数据集,是针对通用的边缘检测目的的,什么形状的边缘都有,比如下面这种:

用这份数据训练出来的模型,在做文档扫描的时候,检测出来的边缘效果并不理想,而且这份训练数据集的样本数量也很小,只有一百多张图片 (因为这种图片的人工标注成本太高了),这也会影响模型的质量。
现在的需求里,要检测的是具有一定透视和旋转变换效果的矩形区域,所以可以大胆的猜测,如果准备一批针对性更强的训练样本,应该是可以得到更好的边缘检测效果的。
借助第一版技术方案收集回来的真实场景图片,我们开发了一套简单的标注工具,人工标注了 1200 张图片 (标注这 1200 张图片的时间成本也很高),但是这 1200 多张图片仍然有很多问题,比如对于神经网络来说,1200 个训练样本其实还是不够的,另外,这些图片覆盖的场景其实也比较少,有些图片的相似度比较高,这样的数据放到神经网络里训练,泛化的效果并不好。
所以,还采用技术手段,合成了 80000 多张训练样本图片。
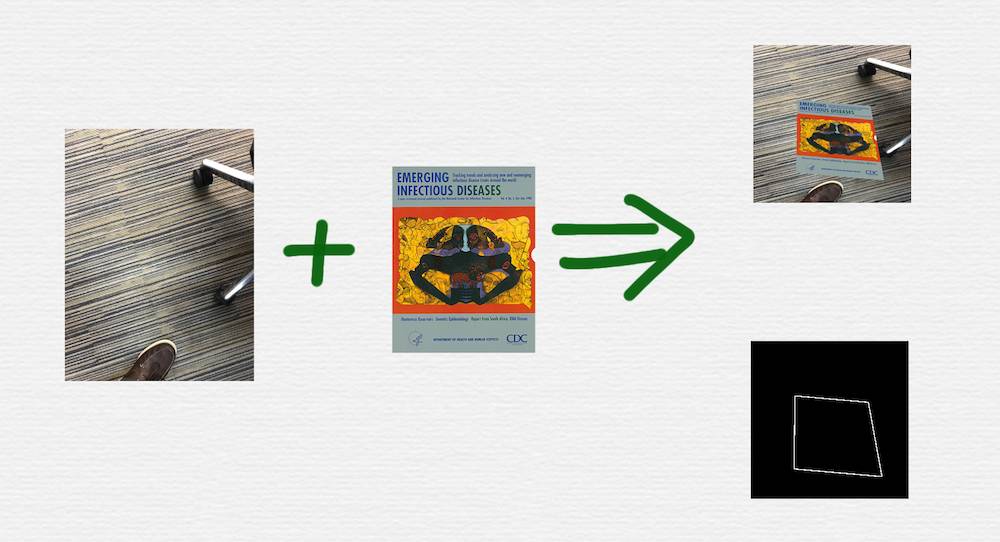
如上图所示,一张背景图和一张前景图,可以合成出一对训练样本数据。在合成图片的过程中,用到了下面这些技术和技巧:
-
在前景图上添加旋转、平移、透视变换
-
对背景图进行了随机的裁剪
-
通过试验对比,生成合适宽度的边缘线
-
OpenCV 不支持透明图层之间的旋转和透视变换操作,只能使用最低精度的插值算法,为了改善这一点,后续改成了使用 iOS 模拟器,通过 CALayer 上的操作来合成图片
-
在不断改进训练样本的过程中,还根据真实样本图片的统计情况和各种途径的反馈信息,刻意模拟了一些更复杂的样本场景,比如凌乱的背景环境、直线边缘干扰等等
经过不断的调整和优化,最终才训练出一个满意的模型,可以再次通过下面这张图表中的第二列看一下神经网络模型的边缘检测效果:
在手机设备上运行 TensorFlow
在手机上使用 TensorFlow 库
TensorFlow 官方是支持 iOS 和 Android 的,而且有清晰的文档,照着做就行。但是因为 TensorFlow 是依赖于 protobuf 3 的,所以有可能会遇到一些其他的问题,比如下面这两种,就是我们在两个不同的 iOS APP 中遇到的问题和解决办法,可以作为一个参考:
-
A 产品使用的是 protobuf 2,同时由于各种历史原因,使用并且停留在了很旧的某个版本的 Base 库上,而 protobuf 3 的内部也使用了 Base 库,当 A 产品升级到 protobuf 3 后,protobuf 3 的 Base 库和 A 源码中的 Base 库产生了一些奇怪的冲突,最后的解决办法是手动修改了 A 源码中的 Base 库,避免编译时的冲突
-
B 产品也是使用的 protobuf 2,而且 B 产品使用到的多个第三方模块 (没有源码,只有二进制文件) 也是依赖于 protobuf 2,直接升级 B 产品使用的 protobuf 库就行不通了,最后采用的方法是修改 TensorFlow 和 TensorFlow 中使用的 protobuf 3 的源代码,把 protobuf 3 换了一个命名空间,这样两个不同版本的 protobuf 库就可以共存了
Android 上因为本身是可以使用动态库的,所以即便 app 必须使用 protobuf 2 也没有关系,不同的模块使用 dlopen 的方式加载各自需要的特定版本的库就可以了。
在手机上使用训练得到的模型文件
模型通常都是在 PC 端训练的,对于大部分使用者,都是用 Python 编写的代码,得到 ckpt 格式的模型文件。在使用模型文件的时候,一种做法就是用代码重新构建出完整的神经网络,然后加载这个 ckpt 格式的模型文件,如果是在 PC 上使用模型文件,用这个方法其实也是可以接受的,复制粘贴一下 Python 代码就可以重新构建整个神经网络。但是,在手机上只能使用 TensorFlow 提供的 C++ 接口,如果还是用同样的思路,就需要用 C++ API 重新构建一遍神经网络,这个工作量就有点大了,而且 C++ API 使用起来比 Python API 复杂的多,所以,在 PC 上训练完网络后,还需要把 ckpt 格式的模型文件转换成 pb 格式的模型文件,这个 pb 格式的模型文件,是用 protobuf 序列化得到的二进制文件,里面包含了神经网络的具体结构以及每个矩阵的数值,使用这个 pb 文件的时候,不需要再用代码构建完整的神经网络结构,只需要反序列化一下就可以了,这样的话,用 C++ API 编写的代码就会简单很多,其实这也是 TensorFlow 推荐的使用方法,在 PC 上使用模型的时候,也应该使用这种 pb 文件 (训练过程中使用 ckpt 文件)。
HED 网络在手机上遇到的奇怪 crash
在手机上加载 pb 模型文件并且运行的时候,遇到过一个诡异的错误,内容如下:
Invalid argument: No OpKernel was registered to support Op 'Mul' with these attrs. Registered devices: [CPU], Registered kernels:
device='CPU'; T in [DT_FLOAT]
[[Node: hed/mul_1 = Mul[T=DT_INT32](hed/strided_slice_2, hed/mul_1/y)]]
之所以诡异,是因为从字面上看,这个错误的含义是缺少乘法操作 (Mul),但是我用其他的神经网络模型做过对比,乘法操作模块是可以正常工作的。
Google 搜索后发现很多人遇到过类似的情况,但是错误信息又并不相同,后来在 TensorFlow 的 github issues 里终于找到了线索,综合起来解释,是因为 TensorFlow 是基于操作 (Operation) 来模块化设计和编码的,每一个数学计算模块就是一个 Operation,由于各种原因,比如内存占用大小、GPU 独占操作等等,mobile 版的 TensorFlow,并没有包含所有的 Operation,mobile 版的 TensorFlow 支持的 Operation 只是 PC 完整版 TensorFlow 的一个子集,我遇到的这个错误,就是因为使用到的某个 Operation 并不支持 mobile 版。
按照这个线索,在 Python 代码中逐个排查,后来定位到了出问题的代码,修改前后的代码如下:
def deconv(inputs, upsample_factor):
input_shape = tf.shape(inputs)
# Calculate the ouput size of the upsampled tensor
upsampled_shape = tf.pack([input_shape[0],
input_shape[1] * upsample_factor,
input_shape[2] * upsample_factor,
1])
upsample_filter_np = bilinear_upsample_weights(upsample_factor, 1)
upsample_filter_tensor = tf.constant(upsample_filter_np)
# Perform the upsampling
upsampled_inputs = tf.nn.conv2d_transpose(inputs, upsample_filter_tensor,
output_shape=upsampled_shape,
strides=[1, upsample_factor, upsample_factor, 1])
return upsampled_inputs
def deconv_mobile_version(inputs, upsample_factor, upsampled_shape):
upsample_filter_np = bilinear_upsample_weights(upsample_factor, 1)
upsample_filter_tensor = tf.constant(upsample_filter_np)
# Perform the upsampling
upsampled_inputs = tf.nn.conv2d_transpose(inputs, upsample_filter_tensor,
output_shape=upsampled_shape,
strides=[1, upsample_factor, upsample_factor, 1])
return upsampled_inputs
问题就是由 deconv 函数中的 tf.shape 和 tf.pack 这两个操作引起的,在 PC 版代码中,为了简洁,是基于这两个操作,自动计算出 upsampled_shape,修改过后,则是要求调用者用 hard coding 的方式设置对应的 upsampled_shape。
裁剪 TensorFlow
TensorFlow 是一个很庞大的框架,对于手机来说,它占用的体积是比较大的,所以需要尽量的缩减 TensorFlow 库占用的体积。
其实在解决前面遇到的那个 crash 问题的时候,已经指明了一种裁剪的思路,既然 mobile 版的 TensorFlow 本来就是 PC 版的一个子集,那就意味着可以根据具体的需求,让这个子集变得更小,这也就达到了裁剪的目的。具体来说,就是修改 TensorFlow 源码中的 tensorflow/tensorflow/contrib/makefile/tf_op_files.txt 文件,只保留使用到了的模块。针对 HED 网络,原有的 200 多个模块裁剪到只剩 46 个,裁剪过后的 tf_op_files.txt 文件如下:
tensorflow/core/kernels/xent_op.cc
tensorflow/core/kernels/where_op.cc
tensorflow/core/kernels/unpack_op.cc
tensorflow/core/kernels/transpose_op.cc
tensorflow/core/kernels/transpose_functor_cpu.cc
tensorflow/core/kernels/tensor_array_ops.cc
tensorflow/core/kernels/tensor_array.cc
tensorflow/core/kernels/split_op.cc
tensorflow/core/kernels/split_v_op.cc
tensorflow/core/kernels/split_lib_cpu.cc
tensorflow/core/kernels/shape_ops.cc
tensorflow/core/kernels/session_ops.cc
tensorflow/core/kernels/sendrecv_ops.cc
tensorflow/core/kernels/reverse_op.cc
tensorflow/core/kernels/reshape_op.cc
tensorflow/core/kernels/relu_op.cc
tensorflow/core/kernels/pooling_ops_common.cc
tensorflow/core/kernels/pack_op.cc
tensorflow/core/kernels/ops_util.cc
tensorflow/core/kernels/no_op.cc
tensorflow/core/kernels/maxpooling_op.cc
tensorflow/core/kernels/matmul_op.cc
tensorflow/core/kernels/immutable_constant_op.cc
tensorflow/core/kernels/identity_op.cc
tensorflow/core/kernels/gather_op.cc
tensorflow/core/kernels/gather_functor.cc
tensorflow/core/kernels/fill_functor.cc
tensorflow/core/kernels/dense_update_ops.cc
tensorflow/core/kernels/deep_conv2d.cc
tensorflow/core/kernels/xsmm_conv2d.cc
tensorflow/core/kernels/conv_ops_using_gemm.cc
tensorflow/core/kernels/conv_ops_fused.cc
tensorflow/core/kernels/conv_ops.cc
tensorflow/core/kernels/conv_grad_filter_ops.cc
tensorflow/core/kernels/conv_grad_input_ops.cc
tensorflow/core/kernels/conv_grad_ops.cc
tensorflow/core/kernels/constant_op.cc
tensorflow/core/kernels/concat_op.cc
tensorflow/core/kernels/concat_lib_cpu.cc
tensorflow/core/kernels/bias_op.cc
tensorflow/core/ops/sendrecv_ops.cc
tensorflow/core/ops/no_op.cc
tensorflow/core/ops/nn_ops.cc
tensorflow/core/ops/nn_grad.cc
tensorflow/core/ops/array_ops.cc
tensorflow/core/ops/array_grad.cc
需要强调的一点是,这种操作思路,是针对不同的神经网络结构有不同的裁剪方式,原则就是用到什么模块就保留什么模块。当然,因为有些模块之间还存在隐含的依赖关系,所以裁剪的时候也是要反复尝试多次才能成功的。
除此之外,还有下面这些通用手段也可以实现裁剪的目的:
-
编译器级别的 strip 操作,在链接的时候会自动的把没有调用到的函数去除掉 (集成开发环境里通常已经自动将这些参数设置成了最佳组合)
-
借助一些高级技巧和工具,对二进制文件进行瘦身
借助所有这些裁剪手段,最终我们的 ipa 安装包的大小只增加了 3M。如果不做手动裁剪这一步,那 ipa 的增量,则是 30M 左右。
裁剪 HED 网络
按照 HED 论文给出的参考信息,得到的模型文件的大小是 56M,对于手机来说也是比较大的,而且模型越大也意味着计算量越大,所以需要考虑能否把 HED 网络也裁剪一下。
HED 网络是用 VGG16 作为基础网络结构,而 VGG 又是一个得到广泛验证的基础网络结构,因此修改 HED 的整体结构肯定不是一个明智的选择,至少不是首选的方案。
考虑到现在的需求,只是检测矩形区域的边缘,而并不是检测通用场景下的广义的边缘,可以认为前者的复杂度比后者更低,所以一种可行的思路,就是保留 HED 的整体结构,修改 VGG 每一组卷积层里面的卷积核的数量,让 HED 网络变的更『瘦』。
按照这种思路,经过多次调整和尝试,最终得到了一组合适的卷积核的数量参数,对应的模型文件只有 4.2M,在 iPhone 7P 上,处理每帧图片的时间消耗是 0.1 秒左右,满足实时性的要求。
神经网络的裁剪,目前在学术界也是一个很热门的领域,有好几种不同的理论来实现不同目的的裁剪,但是,也并不是说每一种网络结构都有裁剪的空间,通常来说,应该结合实际情况,使用合适的技术手段,选择一个合适大小的模型文件。
TensorFlow API 的选择
TensorFlow 的 API 是很灵活的,也比较底层,在学习过程中发现,每个人写出来的代码,风格差异很大,而且很多工程师又采用了各种各样的技巧来简化代码,但是这其实反而在无形中又增加了代码的阅读难度,也不利于代码的复用。
第三方社区和 TensorFlow 官方,都意识到了这个问题,所以更好的做法是,使用封装度更高但又保持灵活性的 API 来进行开发。本文中的代码,就是使用 TensorFlow-Slim 编写的。
OpenCV 算法
虽然用神经网络技术,已经得到了一个比 canny 算法更好的边缘检测效果,但是,神经网络也并不是万能的,干扰是仍然存在的,所以,第二个步骤中的数学模型算法,仍然是需要的,只不过因为第一个步骤中的边缘检测有了大幅度改善,所以第二个步骤中的算法,得到了适当的简化,而且算法整体的适应性也更强了。
这部分的算法如下图所示:
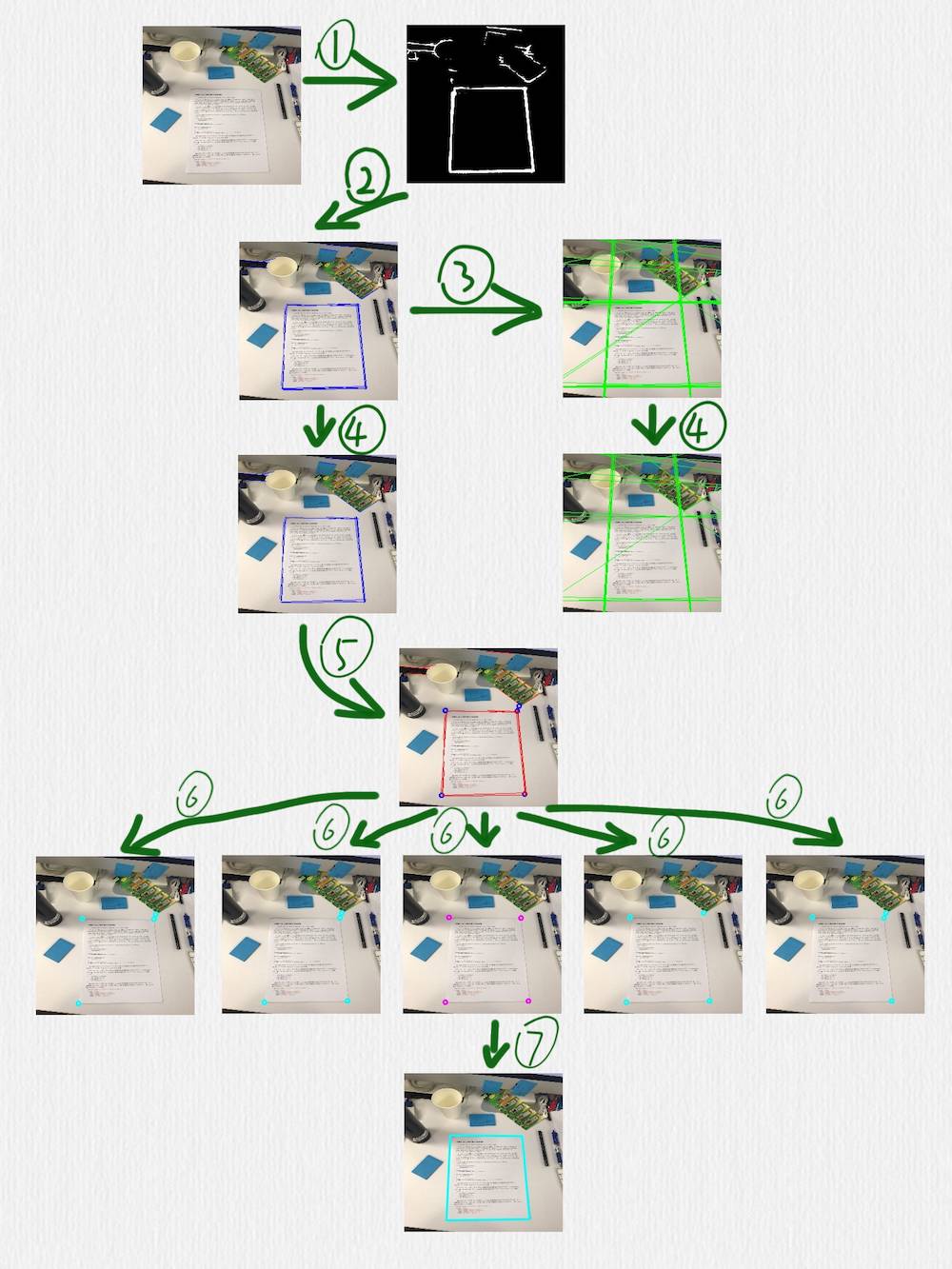
按照编号顺序,几个关键步骤做了下面这些事情:
-
用 HED 网络检测边缘,可以看到,这里得到的边缘线还是存在一些干扰的
-
在前一步得到的图像上,使用 HoughLinesP 函数检测线段 (蓝色线段)
-
把前一步得到的线段延长成直线 (绿色直线)
-
在第二步中检测到的线段,有一些是很接近的,或者有些短线段是可以连接成一条更长的线段的,所以可以采用一些策略把它们合并到一起,这个时候,就要借助第三步中得到的直线。定义一种策略判断两条直线是否相等,当遇到相等的两条直线时,把这两条直线各自对应的线段再合并或连接成一条线段。这一步完成后,后面的步骤就只需要蓝色的线段而不需要绿色的直线了
-
根据第四步得到的线段,计算它们之间的交叉点,临近的交叉点也可以合并,同时,把每一个交叉点和产生这个交叉点的线段也要关联在一起 (每一个蓝色的点,都有一组红色的线段和它关联)
-
对于第五步得到的所有交叉点,每次取出其中的 4 个,判断这 4 个点组成的四边形是否是一个合理的矩形 (有透视变换效果的矩形),除了常规的判断策略,比如角度、边长的比值之外,还有一个判断条件就是每条边是否可以和第五步中得到的对应的点的关联线段重合,如果不能重合,则这个四边形就不太可能是我们期望检测出来的矩形
-
经过第六步的过滤后,如果得到了多个四边形,可以再使用一个简单的过滤策略,比如排序找出周长或面积最大的矩形
对于上面这个例子,第一版技术方案中检测出来的边缘线如下图所示:
有兴趣的读者也可以考虑一下,在这种边缘图中,如何设计算法才能找出我们期望的那个矩形。
总结
算法角度
-
神经网络的参数 / 超参数的调优,通常只能基于经验来设置,有 magic trick 的成分
-
神经网络 / 机器学习是一门试验科学
-
对于监督学习,数据的标注成本很高,这一步很容易出现瓶颈
-
论文、参考代码和自己的代码,这三者之间不完全一致也是正常现象
-
对于某些需求,可以在模型的准确度、大小和运行速度之间找一个平衡点
工程角度
-
end-to-end 网络无效的时候,可以用 pipeline 的思路考虑问题、拆分业务,针对性的使用神经网络技术
-
至少要熟练掌握一种神经网络的开发框架,而且要追求代码的工程质量
-
要掌握神经网络技术中的一些基本套路,举一反三
-
要在学术界和工业界中间找平衡点,尽可能多的学习一些不同问题领域的神经网络模型,作为技术储备
参考文献
因不能添加外链接,请点击以下原文发布地址查看。
原文地址:http://fengjian0106.github.io/2017/05/08/Document-Scanning-With-TensorFlow-And-OpenCV/
更多有关GMIS 2017大会的内容,请点击「阅读原文」查看机器之心官网 GMIS 专题↓↓↓


这篇文章还没有评论